
Почему и как?
Рисунок изображает автомобиль, идущий через поворот (в данном случае, поворот бесконечен). Красные линии изображают путь, по которому движутся колеса. Вы можете заметить, что внутренние колеса автомобиля следуют по окружности меньшего диаметра, чем внешние колеса.
Если оба колеса повернуты на одинаковую величину, внутреннее колесо будет скрестись по дороге (будет скользить боком) и будет снижать эффективность рулевого управления. Это скольжение колеса, которое также создает нежелательный нагрев и износ колеса, может быть устранено с помощью поворота внутреннего колеса на больший угол, чем угол поворота внешнего колеса.
Различие в углах внутреннего и внешнего колес может быть лучше понято путем изучения рисунка, где помечены внутренний и внешний радиусы, по которым движутся каждое из колес. Внутренний радиус (Ri) и внешний радиус (Ro) зависят от ряда факторов, включая ширину автомобиля и крутизну поворота, который собирается пройти автомобиль.
Следовательно, величины углов рычагов не определяются этими линиями, они определяются расстояниями, показанными в последующих разделах "Увеличенный", "Уменьшенный" и "Точный угол Аккермана" в рулевом управлении.
Расположение обоих колес в надлежащем направлении движения обеспечивает стабильное управление без чрезмерного износа и нагрева каждого из колес.
Очевидно, что при повороте одного из колес более, чем другого, вы рассогласовываете направление колес и вам нужно это сделать в то же время обеспечивая прямое направление обоих колес, когда автомобиль не поворачивает. Для обеспечения этого, необходимо, чтобы рассогласование направления росло от нулевого значения (колеса направлены прямо вперед) до точки, в которой существует значительное различие в углах между обоими колесами (при максимальном повороте колес).
Углы рулевых рычагов
Создание рассогласования колес достигается путем комбинации угла и длины рулевых рычагов. Ниже вы сможете увидеть несколько рисунков, которые приводят примеры использования параллельных и наклонных рулевых рычагов, для демонстрации того, почему необходимо использовать принцип Аккермана в рулевом управлении.
Параллельные рулевые рычаги
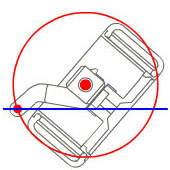
На этом рисунке рулевые рычаги направлены прямо и параллельно боковым сторонам автомобиля, что создает ситуацию, в которой перемещение рулевого сервопривода приводит к равному угловому перемещению колес.
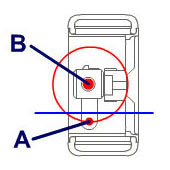
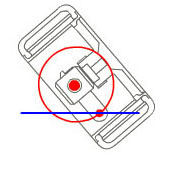
Почему происходит это равное угловое перемещение можно увидеть, изучив рисунок слева, на котором нарисована красная окружность для демонстрации того, как боковое перемещение рулевого рычага преобразуется в круговое перемещение. Так как шарнир рулевого рычага (A) выровнен по вертикали с осью поворота колеса (B), когда колесо указывает прямо вперед, то одинаковые перемещения влево или вправо перемещают шарнир рулевого рычага на одинаковую вертикальную дистанцию от начального положения.
Наклонные рулевые рычаги
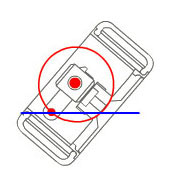
На этом рисунке рулевые рычаги наклонены внутрь для создания возможности различной степени изменения углов поворота колес. Это является основой принципа Аккермана и создает неравное угловое перемещение колес.
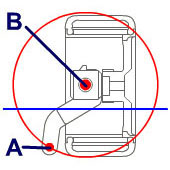
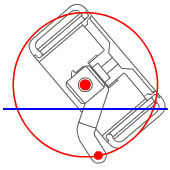
Почему происходит это неравное угловое перемещение можно увидеть на рисунке, на котором отображено относительное положение шарнира рулевого рычага (A) на красной окружности, чтобы показать как шарнир рулевого рычага движется вокруг оси поворота колеса (B).
Так как рулевой рычаг наклонен, шарнир рулевого рычага (A) не выровнен по вертикали с осью поворота колеса (B), когда колесо указывает прямо вперед, и находится на части пути по окружности. Из-за этого, правое движение рулевого рычага вызывает большее перемещение шарнира рулевого рычага в вертикальном направлении, чем это имеет место при левом перемещении рулевого рычага.
Самым важным является то, что это неравное угловое перемещение является экспоненциальным, то есть, чем больше вы поворачиваете колесо, тем больше становится угловое различие между колесами - в противном случае оба колеса никогда не будут указывать прямо вперед, когда автомобиль не поворачивает.
Вышеприведенный умышленно подчеркнутый пример в результате приводит к угловому различию между колесами в диапазоне этого рисунка, тогда как пример с параллельными рулевыми рычагами будет обеспечивать одинаковые углы поворота колес с обоих сторон.
Увеличенный, уменьшенный и точный угол Аккермана в рулевом управлении
Это часто употребляемые термины в спортивном моделировании и они относятся к величине разницы в углах колес относительно точной геометрии угла Аккермана в рулевом управлении.
Точный угол Аккермана - нулевое схождение при повороте
На рисунке изображена точная геометрия угла Аккермана в рулевом управлении. Это определяется наклоном рулевых рычагов таким образом, чтобы линии, проведенные через ось поворота колеса и шарнир рулевого рычага, пересекались в центре линии задней оси.
Так как это обеспечивает точную геометрию угла Аккермана в рулевом управлении, то в этом случае отсутствует изменение угла схождения на внутреннем колесе (направление колеса совпадает с направлением окружности), что можно увидеть на рисунке.
Увеличенный угол Аккермана - расхождение при повороте
В настройке рулевого управления может быть использован увеличенный угол Аккермана, что включает в себя регулировку положения шарниров рулевых рычагов, чтобы линии, проведенные через ось поворота колеса и шарнир рулевого рычага, пересеклись перед центром задней оси.
Такая геометрия рулевого управления позволяет достичь увеличенного углового различия между повернутыми колесами, что приводит к тому, что внутреннее колесо пытается следовать по окружности меньшего диаметра, чем это имеет место в действительности. Этот эффект можно наблюдать на рисунке выше и он вызывает расхождение на переднем внутреннем колесе.
Уменьшенный угол Аккермана - схождение при повороте
В настройке рулевого управления может быть использован уменьшенный угол Аккермана, что включает в себя регулировку положения шарниров рулевых рычагов, чтобы линии, проведенные через ось поворота колеса и шарнир рулевого рычага, пересеклись позади центра задней оси.
Такая геометрия рулевого управления позволяет достичь сниженного углового различия между повернутыми колесами, что приводит к тому, что внутреннее колесо пытается следовать по окружности большего диаметра, чем это имеет место в действительности. Этот эффект можно наблюдать на рисунке выше и он вызывает схождение на переднем внутреннем колесе.
Длина рычагов рулевого управления
Так как рулевые рычаги являются рычагами, их длина является более или менее свободной величиной, но она ограничена зазорами и доступным пространством в модели.
Величина перемещения, которая может осуществляться узлом сервопривод/тяги рулевого управления является также основным фактором, который вы должны учитывать при размышлениях о моментах вращения рычагов с различной длиной.
Как угол схождения влияет на углы Аккермана
Взаимодействие между углом схождения и углом Аккермана
Этот раздел описывает взаимодействие между углами Аккермана и углами схождения.
Примечание:
В последующих разделах приведены различные настройки, которые могут быть применены к модели автомобиля, но нужно учесть тот факт, что углы схождения могут быть установлены в любой угол и поэтому возможно бесконечное число вариантов
. Возможно обобщить только некоторые из рисунков, так как угол Аккермана фиксирован только в случае точного угла Аккермана - в случаях увеличенного и уменьшенного углов Аккермана, они не являются фиксированными углами.
Точный угол Аккермана вместе со схождением
В этом примере автомобиль обладает схождением передних колес и точным углом Аккермана.
Когда колеса поворачиваются, это заканчивается схождением обоих колес по отношению к круговым траекториям, по которым они следуют.
Точный угол Аккермана вместе с расхождением
В этом примере автомобиль обладает расхождением передних колес и точным углом Аккермана.
Когда колеса поворачиваются, это заканчивается расхождением обоих колес по отношению к круговым траекториям, по которым они следуют.
Увеличенный угол Аккермана вместе со схождением
В этом примере автомобиль обладает схождением передних колес и увеличенным углом Аккермана.
Когда колеса поворачиваются, это заканчивается схождением внешнего колеса и параллельностью внутреннего колеса по отношению к круговым траекториям, по которым они следуют.
Как упоминалось выше, угол поворота колес зависит от величины угла Аккермана и величины угла схождения. Углы на этом рисунке будут корректны только в том случае, если угол схождения равен по величине углу, который создает геометрия Аккермана.
Увеличенный угол Аккермана вместе с расхождением
В этом примере автомобиль обладает расхождением передних колес и увеличенным углом Аккермана.
Когда колеса поворачиваются, это заканчивается расхождением обоих колес по отношению к круговым траекториям, по которым они следуют.
Уменьшенный угол Аккермана вместе со схождением
В этом примере автомобиль обладает схождением передних колес и уменьшенным углом Аккермана.
Когда колеса поворачиваются, это заканчивается схождением обоих колес по отношению к круговым траекториям, по которым они следуют.
Уменьшенный угол Аккермана вместе с расхождением
В этом примере автомобиль обладает расхождением передних колес и уменьшенным углом Аккермана.
Когда колеса поворачиваются, это заканчивается расхождением внешнего колеса и параллельностью внутреннего колеса по отношению к круговым траекториям, по которым они следуют.
Как упоминалось выше, угол поворота колес зависит от величины угла Аккермана и величины угла схождения. Углы на этом рисунке будут корректны только в том случае, если угол схождения равен по величине углу, который создает геометрия Аккермана.




